
زمان تخمینی مطالعه: 21 دقیقه
بینایی ماشین فناوری است که با استفاده از پردازش تصویر، بازرسی، تجزیه و تحلیل خودکار را برای کاربردهایی از جمله بازرسی خودکار، کنترل فرآیند و هدایت رباتیک ممکن میسازد. این موضوع مهم است بدانید که هنگام ذکر بینایی ماشین میتوان به بسیاری از فن آوریهای مختلف، محصولات نرم افزاری و سخت افزاری، سیستمهای یکپارچه، اقدامات، روشها و تخصص اشاره کرد. بینایی ماشین یک قابلیت فنی است که با فناوریهای موجود به روشهای جدید ادغام شده و آن را با هدف حل مشکلات دنیای واقعی به کار میگیرد.
بینایی ماشین یک رشته مهندسی سیستم است و میتوان آن را متمایز از بینایی کامپیوتری دانست که نوعی جزء علم کامپیوتر است که از طریق یک قطعه سخت افزاری ملموس مانند جعبه بینایی یا دوربین متصل به ربات انجام نمیشود. ماشین ویژن بدنه یک سیستم است و بینایی کامپیوتری هوشمندی سیستم است، شبیه به اینکه چگونه یک کامپیوتر فیزیکی مانند چارچوبی برای قطعات داخلی آن سیستم است. بدون بینایی کامپیوتری، بینایی ماشین نمیتواند کار کند زیرا مغز پشت پردازش اطلاعات است. توجه به این نکته مهم است که وقتی فناوری بینایی کامپیوتر پیشرفت میکند، به احتمال زیاد کاربردهای بالقوه بینایی ماشین به ترتیب افزایش مییابد. سیستمهای بینایی ماشین از دهه 1950 شروع به کار کردهاند و بین سالهای 1980 تا 1990 سر آغاز رشد و محبوبیت فناوری ماشین ویژن بود.
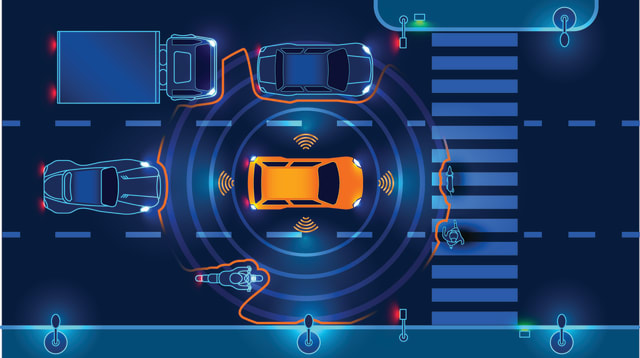
بینایی ماشین به آهستگی به طور فزایندهای در محیطهای اتوماسیون صنعتی محبوب پیدا کرد، از آن سو در صنایع دیگر مانند امنیت، وسایل نقلیه خودران، تولید مواد غذایی، بستهبندی، و لجستیک نیز بیشتر مورد استفاده قرار گرفت. رباتیک و صنایع هواپیماهای بدون سرنشین نیز بسیار علاقمند به استفاده از Machine Vision در بخشهای مختلف خود بودند. بینایی ماشین را میتوان با فناوریهایی مانند یادگیری عمیق و یادگیری ماشین ادغام کرد تا به کسبوکارهایی که از این فناوری استفاده میکنند کمک کند تا دادهها را بهتر درک کنند و کسبوکار را برای کارایی بالاتر بهینهسازی کنند، به عنوان مثالی موفق میتوان نحوه استفاده شرکت BMW از فناوری در کنار هوش مصنوعی و یادگیری ماشینی برای افزایش کارایی را نام برد.
تعاریف بینایی ماشین
بینایی ماشین تعاریف مختلفی را برای چیستی و نحوه عملکرد آن گردآوری کرده است. توجه به این نکته مهم است که بینایی ماشین به هیچ وجه با پردازش تصویر که فرآیندی است که در آن خروجی تولید شده، تصویر دیگری است یکسان نیست. اطلاعاتی که توسط بینایی ماشین گرفته میشود به شکلی از دادهها برای درک هویت، موقعیت و جهتگیری اشیایی که توسط سیستم بینایی ماشین ثبت میشود، ترجمه میشود.
نمونهای از یک تعریف گستردهتر، تعریفی است که توسط انجمن تصویربرداری خودکار (AIA) ارائه شده است، جایی که آنها توضیح میدهند که بینایی ماشین تمام کاربردهای صنعتی و غیر صنعتی را در بر میگیرد که در آن ترکیبی از سخت افزار و نرم افزار راهنمایی عملیاتی را برای دستگاهها در اجرای عملکردهایشان در ضبط و پردازش تصاویر ارائه میکند.
بازرسی و مرتبسازی تصویربرداری
کاربردهای اولیه این فناوری، بازرسی خودکار، مرتبسازی و هدایت رباتیک مبتنی بر تصویربرداری است. این فناوری را میتوان روی یک ربات به کار برد تا بتواند اشیاء را در مکانی خاص قرار دهد یا از مکانی مشخص بیاورد که به نام انتخاب و جایگذاری نیز شناخته میشود، در حالی که میتوان آن را برای بخشی از یک راهحل نهایی در چندین نقطه از سیستم برای شناسایی، بازرسی و شناسایی قطعات مورد نیاز در سراسر سیستم اعمال کرد. همچنین این فناوری را میتوان با دوربین طیفنگار(spectrograph camera) استفاده کرد که به تصاویر و زمانی که اشیا در حال بازرسی و مرتبسازی هستند، رنگ میافزاید. با این حال، این روش با تأخیر همراه است، زیرا پردازش دادهها به دلیل وجود تصاویر با جزئیات بیشتر، بیشتر طول میکشد.
در واقع، سیستمهای بینایی ماشین را میتوان به صورت سفارشی طراحی و در یک سیستم پیادهسازی کرد تا با الزامات برنامه کاربر مطابقت داشته باشد. اگر این برنامه برای صنعت غذا و نوشیدنی باشد، احتمالاً الزامات این سیستم در مقایسه با مواردی که برای صنعت خودرو نیاز به استفاده دارد، متفاوت خواهد بود. یک سیستم ماشین ویژن میتواند طیف وسیعی از اشیاء و اقلام را در صنایع مختلفی از جمله خودروسازی، الکترونیک و نیمه هادیها، مواد غذایی و آشامیدنی، ترافیک جادهای و وسایل نقلیه یا سیستمهای حمل و نقل هوشمند (ITS)، تصویربرداری پزشکی، بستهبندی، برچسب زدن، چاپ، داروسازی، توسعه علمی و پخش تلویزیونی بازرسی و مرتب کند.
تجهیزات بینایی ماشین
بسته به نقش بینایی ماشین در سیستم و اینکه کاربرد فناوری به عنوان چه نوع راه حلی طراحی شده است، نوع تجهیزاتی که سیستم بینایی نیاز دارد را تغییر میدهد. برخی از سیستمها فقط به چند قطعه محدود نیاز دارند در حالی که برخی دیگر به چند قطعه از همان قسمت در سراسر خط پردازش یا سیستم راه حل نیاز دارند.

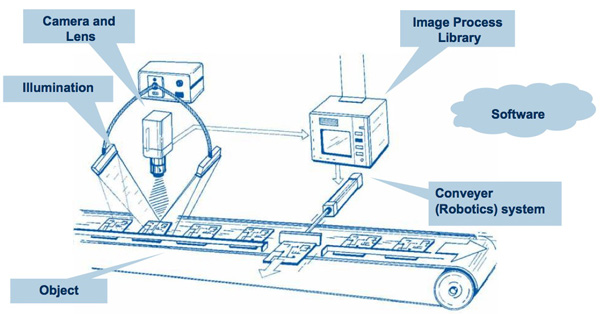
به عنوان مثال، اگر سیستم نیاز به بازرسی زمانی در خط تولید خود داشته باشد که محصولی وارد خط فرآیند تولید میشود، سپس نیاز به بررسی برچسبهای مختلف در نیمه راه سیستم خط تولید داشته باشد، و زمانی که محصول به مرحله نهایی تولید میرسد ممکن است نیاز به تشخیص دقیقتری برای یافتن عیوب خاص داشته باشد. در مقایسه با موقعیتی که فقط به یک برچسب برای بررسی نیاز دارد تا توسط دوربین استاندارد انجام شود، جزئیات بسیار بیشتری دارند. با این حال، اغلب اوقات اجزای یک سیستم بازرسی و مرتبسازی خودکار معمولاً شامل نوعی نورپردازی برای واضح و قابل مشاهده شدن جسم، دوربین برای دیدن شی، پردازنده، نرمافزار برای درک پردازنده و دستگاهی خروجی یا رابط صفحه نمایش انسانی(HMI) برای تجسم داده دارد.
در ادامه این بخش به تجهیزات بینایی ماشین میپردازیم:
- دوربینها: طیف وسیعی از دوربینهای مختلف برای یک سیستم بینایی ماشین با رابطها، پیکسلها، وضوح و ویژگیهای مختلف موجود است. دوربینها قطعه اصلی تجهیزات برای بازرسی شی یا آیتم در سیستم بینایی ماشین هستند. ممکن است سیستم نیاز به استفاده از چندین دوربین برای فرآیندی داشته باشد که از آن به عنوان دوربین دوگانه یاد میشود. این بدان معناست که چندین دوربین برای یک نقطه خاص از بازرسی و بررسی وجود دارد تا مطمئن شوید که هیچ قسمت پنهانی از شی مورد بررسی وجود نداشته باشد.
- دوربینهای هوشمند: هنگامی که یک سیستم بینایی ماشین نیاز به گرفتن و استخراج اطلاعات خاص برنامه از یک تصویر دارد، یک دوربین هوشمند مورد نیاز است. دوربین هوشمند قادر به تولید توضیحات و تصمیمگیری است. یک دوربین هوشمند معمولاً شامل تمام رابطهای ارتباطی لازم و همچنین قابلیت اتصال به وای فای یا سرور برای انتقال آسان دادههای تصویر گرفته شده است.
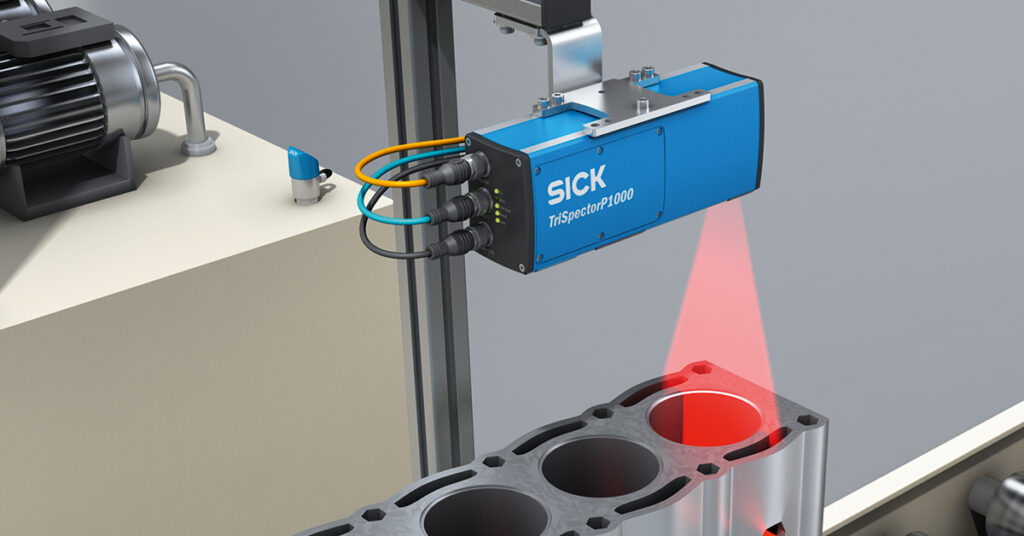
- دوربینهای سه بعدی: دوربینهای سهبعدی عمق یک آیتم را در تصویر نشان میدهند تا زوایای مختلف تصویر نشان داده شود و شکل یک آیتم ایدهآل شود. استفاده از دوربین سه بعدی در سیستم بینایی ماشین، چشم اندازهای مختلف و درک عمق تصویر را امکان پذیر میکند.
- دوربینهای حرارتی: دوربین تصویربرداری حرارتی نوعی دوربین ترموگرافی است که تصاویر را از طریق تابش مادون قرمز نشان میدهد که مناطق دارای گرما را روی تصاویر نشان میدهد.
- نرم افزار: یک سیستم بینایی ماشین به نرمافزاری نیاز دارد تا دادهها را تجسم کند و نشان دهد که دوربینها به چه چیزی نگاه میکنند تا اپراتورها برای تجزیه و تحلیل و نگهداری سیستم و همچنین برنامهنویسی عملکردهای سختافزار به دنبال آن هستند. نرم افزارهای مختلفی وجود دارد که میتواند برای آنچه که سیستم بینایی ماشین باید انجام دهد و دادههایی که باید از سیستم برای اپراتورها تجسم شود مطابقت داده شود.
- سیستمهای جاسازی شده(Embedded): سیستمهای توکار برای بینایی ماشین، که به عنوان کامپیوتر تصویربرداری نیز شناخته میشود، یک دوربین بدون محفظه یا یک قاب است که مستقیماً به یک برد پردازش متصل است. این مفهوم همه قطعات را در یک کامپیوتر واحد ترکیب میکند. با توجه به افزایش تعداد کتابخانههای منبع باز برای یادگیری ماشین و هوش مصنوعی، سیستمهای بینایی کامپیوتری بیشتری به عنوان سیستمهای توکار یا دستگاههای اینترنت اشیا در حال گسترش هستند.
- قابگیر(Frame grabbers): این یک دستگاه الکترونیکی است که فریمهای ثابت دیجیتالی را از یک سیگنال ویدئویی آنالوگ یا یک جریان ویدئوی دیجیتال ذخیره میکند. میتوان از آن به عنوان افزونهای برای سیستم بینایی ماشین برای ثبت فریمهای خاص برای تجزیه و تحلیل از یک سیستم متحرک سریع استفاده کرد.
- روشنگرها(Illuminators): این مفهوم نور را به سیستم اضافه میکنند تا دوربین نور کافی برای گرفتن تصویر داشته باشد. بسته به جزئیات مورد نیاز در تصویربرداری، نوع روشنایی مورد نیاز برای سیستم بینایی ماشین برای شناسایی آنچه که به آن نیاز دارد، تغییر خواهد کرد.
- لنزها: لنزها تعیین میکنند که دوربین و سیستم بینایی ماشین با چه وضوحی میتوانند عکس بگیرند. هرچه پیکسل دوربین بالاتر باشد، لنزها باید وضوح بیشتری داشته باشند و احتمالاً دوربین بزرگتر خواهد بود.
- محاسبات با کارایی بالا: داشتن یک سیستم محاسباتی با کارایی بالا همیشه لازم نیست. هنگام برخورد با حجم بالایی از اقلام با جزئیات مختلف، آنها مورد نیاز خواهند بود. این نوع پردازشها سیستم بینایی ماشین را قادر میسازد تا اطلاعات را با سرعت بیشتری پردازش کند و معمولاً اگر سیستم از قابلیتهایی مانند یادگیری ماشین، یادگیری عمیق یا شبکههای عصبی استفاده میکند، مورد نیاز است.
- کابل کشی: مانند تمام فناوریها و برنامههای کاربردی، یک سیستم بینایی ماشین نیاز به کابلهای برق برای رفتن به منبع تغذیه اصلی برای کار و اتصال کابلها بین رابط کاربری مانند لپتاپ یا مرکز داده دارد. با این حال، سیستمهای بینایی ماشین به طور فزایندهای میتوانند با اتصال به کلاد برای انتقال دادهها به یک پلتفرم تجسمی یا داده در زمان واقعی استفاده شوند.
- تأیید برچسب: بسته به برنامهای که سیستم برای آن استفاده میشود، نوع تأیید برچسب مورد نیاز را تغییر میدهد. برای صنعتی مانند غذا و نوشیدنی، بررسیهای بستهبندی با جزئیات بیشتری وجود خواهد داشت، مانند اینکه غذا چیست و تاریخ فروش چقدر است.

یک واحد تأیید برچسب میتواند هشدارهایی را ارسال کند، یک سیستم متحرک را متوقف کند، یک مورد را تأیید کند، موارد را در فرآیند تولید رد کند، و هشدارهایی را که مطرح میشوند احراز کند. بسته به سطح جزئیات مورد نیاز، سیستم تأیید برچسب مورد نیاز میتواند تغییر کند. در ساختار واحد تایید برچسب دوربینی با قابلیت بینایی ماشین نصب شده است و باید توجه کرد که این سیستم ها در خطوط تولید و کنترل کیفیت بسیار محبوب هستند.
- رباتها: روباتها به طور فزایندهای از بینایی ماشین برای بهبود کارایی و دقت استفاده میکنند. این مفهوم رباتها را قادر میسازد تا کارهای پیچیدهتری را انجام دهند که بدون اینکه سیستم دقیقاً به ربات بگوید کالا را دقیقاً کجا قرار دهد، ممکن نیست.

فرآیند تصویربرداری بینایی ماشین
دستگاهی که برای تصویربرداری استفاده میشود یا از واحد پردازش تصویر اصلی جدا خواهد بود یا با آن ترکیب میشود که ترکیبی از یک دوربین هوشمند و سنسور هوشمند خواهد بود. هنگامی که عملکرد پردازش کامل در یک محفظه انجام میشود، این کار با استفاده از پردازش توکار انجام شده است و هنگامی که از هم جدا میشود، در سخت افزار دیگری پردازش میشود یا با استفاده از یک ابزار تجسم مانند Camera Link یا CoaXPress به یک گیرنده قاب در رایانه برای ایجاد مفهوم تصویرسازی فرستاده میشود. همچنین میتوان از دوربینهای دیجیتالی با قابلیت اتصال مستقیم بدون گیرنده قاب به رایانه از طریق FireWire، USB یا Gigabit Ethernet استفاده کرد.
معمولاً یک سیستم بینایی ماشین از تصویربرداری دو بعدی معمولی در شرایط نوری استاندارد استفاده میکند. با این حال، هنگامی که یک جسم برای مشاهده عیوب موجود در آن به نور خاصی نیاز دارد، به عنوان مثال، یک سیستم بینایی ماشین میتواند از تصویربرداری چند طیفی، تصویربرداری فراطیفی، باندهای مادون قرمز، تصویربرداری اسکن خطی، تصویربرداری سه بعدی و تصویربرداری اشعه ایکس استفاده کند. تفاوت اصلی در این ساختارهای در این است که تصاویر نور مرئی دوبعدی معمولی در مقایسه با نورهای پیچیده تر تک رنگ هستند که فاکتورهایی مانند رنگ، نرخ فریم، وضوح و همزمانی یا عدم همزمانی فرآیند تصویربرداری در کل تصویر را در نظر میگیرد و آن را برای سیستمهایی که نیاز به فناوری برای ردیابی اقلام متحرک خاص دارند مناسب میکند.
پردازش تصویر
هنگامی که تصویر گرفته شد، معمولاً توسط یک واحد پردازش مرکزی پردازش میشود که معمولاً توسط یک CPU، GPU، یک FPGA یا ترکیبی از این سه انجام میشود. بسته به اندازه سیستمی که تجهیزات بینایی ماشین روی آن قرار میگیرد، واحد پردازش مورد نیاز را تغییر میدهد. به عنوان مثال، اگر این پردازش یک عملیات کوچک است که فقط نیاز به بررسی چندین مورد در روز دارد در مقایسه با یک سیستم بزرگتر که نیاز به بررسی چند مورد در دقیقه دارد، واحد پردازش احتمالاً از نظر آنچه برای پردازش حجم داده مورد نیاز است متفاوت خواهد بود. اگر سیستم بینایی ماشین برای پیادهسازی آموزش ماشینی و یادگیری عمیق باشد، میتواند نیازمند پردازش و عملکرد با مشخصات بالاتر باشد.
معمولا پردازش تصویر در یک توالی پردازشی شرکت میکند که نتیجه نهایی را برای آنچه که سیستم بینایی ماشین استفاده میشود برای نمایش به کاربر نهایی ارائه میدهد. یک توالی معمولی معمولاً با ابزارهایی مانند فیلترهایی که تصویر را تغییر میدهند شروع میشود، سپس شکل و جزئیات اشیاء یا موارد استخراج میشود و سپس دادههای خاصی که باید از آن شکل یا مورد استخراج شوند (مانند بارکد، اندازهگیریها، مقاصد یا کدپستی)، این دادهها سپس به واحد پردازش ارسال میشوند تا نشان دهند که کالا باید کجا ارسال شود یا اینکه آیا مورد بازرسیها را پشت سر گذاشته یا شکست خورده است و غیره.
طیف وسیعی از فیلترها برای استفاده از سیستم بینایی ماشین و روشهای پردازش تصویر وجود دارد. در واقع، بسته به اینکه ماشین ویژن برای چه چیزی استفاده میشود، روی فیلترها و روشهای پردازش تصویری که باید استفاده شود، تأثیر میگذارد. در ادامه این فیلترها را بررسی میکنیم:
- دوخت / ثبت نام(Stitching/Registration): این فرآیندی است که در آن تصاویر از دوربینهای مختلف ثبت تصاویر ترکیب میشوند. در بیشتر موارد، ترکیب یک دوربین دو بعدی با یک دوربین سه بعدی خواهد بود.
- فیلتر کردن: فیلتر کردن به سیستم بینایی ماشین اجازه میدهد تا تصویر را بهطور مناسب دستهبندی کند و تصویر را در دستهای که با برچسبهای مناسب مطابقت دارد، «فیلتر» کند. هرچه اقلام پیچیدهتر از سیستم بینایی ماشین عبور میکنند، احتمال بیشتری وجود دارد که فیلترها برای این آیتم مناسب باشند. فیلترها شبیه اندازهگیری هستند به این معنا که جنبههایی مانند شکل، اندازه، مواد و وزن میتوانند فیلترهایی برای بینایی ماشین باشند تا آنها را بررسی و در نظر بگیرد.
- آستانهگذاری: این فرآیند جداسازی تصاویر را به بخشهایی مجزا ممکن میسازد. این امر مستلزم آن است که سیستم مقدار خاکستری را برای تصاویر برای قسمت جداسازی شده تعیین کند. عملیات Thresholding میتواند برای جدا کردن قسمتهای خاصی از تصویر به بخشهای سیاه و سفید استفاده شود که باید مشخص شود که با بقیه تصویر متفاوت است.
- شمارش پیکسل: این فرآیند تعداد پیکسلهای روشن یا تیره در تصویر را شمارش میکند و معمولاً توسط سنسورهای شمارش پیکسل انجام میشود. فرآیندی که ممکن است مورد استفاده قرار گیرد در سیستم بستهبندی است که در آن حسگرهای شمارش پیکسل میتوانند برچسب بطریها را با ترکیب پیکسلها شناسایی کنند تا تصویری از بطری درست کنند.
- تقسیمبندی(Segmentation): این فرآیند تقسیم تصویر دیجیتال به بخشهای متعدد برای سادهسازی و/یا تغییر نمایش یک تصویر به چیزی معنادار و آسانتر برای تجزیه و تحلیل شی یا قرار دادن آن شی در دستهای خاص است.
- تشخیص لبه: این عملیات بینایی ماشین را قادر میسازد تا لبههای اشیائی را که در حال بررسی هستند را برجسته کرده و ببیند. از طریق یادگیری ماشینی، میتوان به این فناوری یاد داد که چگونه لبههای مختلفی را که ممکن است برای مرتبسازی اقلام یا اشیاء در خط تولید مورد نیاز باشد، شناسایی کند.
- تجزیه و تحلیل رنگ: این عملیات به سیستم بینایی ماشین اجازه میدهد تا کیفیت قطعات، محصولات و اقلام را با استفاده از رنگ شناسایی و ارزیابی کند. همچنین به روشی مشابه میتواند ویژگیها، اقلام یا محصولات را با استفاده از رنگ برای شناسایی عیوب، تغییرات، تفاوتها یا موارد مختلف جدا کند.
- تشخیص و استخراج لکه(Blob): این قابلیت میتواند تصویری را برای حبابهای مجزای پیکسلهای متصل تشخیص دهد که به سیستم اجازه میدهد تا با تشخیص فضاهای خالی یا پر شده متفاوت، متوجه خطاها شود.
- یادگیری ماشینی، یادگیری عمیق و شبکه های عصبی: سه فناوری که میتوانند برای پردازش اقلام از طریق سیستم بینایی ماشین با سرعتی سریعتر مورد استفاده قرار گیرند، یادگیری ماشین، یادگیری عمیق و شبکههای عصبی هستند. این سه فناوری را میتوان برای گسترش درک بینایی ماشین در مورد مواردی که میتوان آنها را به یک دارایی ارزشمند برای بینایی ماشین تبدیل کرد، در صورت وجود اشیاء یا موارد پیچیده و متنوعی که در بازرسی بینایی ماشین وجود دارد، به کار برد.
- شناسایی الگو: با استفاده از شناسایی الگو، سیستم بینایی ماشین میتواند الگوهای خاصی را که در خط فرآیند ظاهر میشوند، پیدا کند، مطابقت دهد و/یا شمارش کند. الگوهای مختلف یا الگوهای پیچیدهتری که باید مراقب آنها بود را میتوان از طریق ماشین یا یادگیری عمیق به ماشین آموزش داد. نمونههایی از این ممکن است اشیاء یا مواردی باشند که ممکن است چرخانده شوند، تا حدی توسط شی دیگری پنهان شده باشند، یا اندازه آنها متفاوت باشد.
- خواندن دادهها: این توانایی خواندن دادههای روی برچسبها یا روی اقلام از طریق ماتریس داده (کد QR)، بارکد، یا شناسایی فرکانس رادیویی (RFID) است. به عنوان مثال میتوان به بارکد برای اقلام خاص اشاره کرد که نشان میدهد چه لباسی است یا بارکدی که نشان میدهد کالا به کدام بخش از کشور یا کدام کشور باید برای مرتبسازی بیشتر ارسال شود. سطح خواندن دادههایی که یک سیستم بینایی ماشین میتواند انجام دهد متفاوت است و به ویژه در هنگام استفاده از اسکن RFID به دلیل برچسبهای مختلفی که میتوان برای موارد مختلف استفاده کرد، پیچیدهتر میشود.
- تشخیص کاراکتر: مشابه خواندن دادهها، استفاده از ویژگی تشخیص کاراکتر این امکان را به سیستم بینایی ماشین میدهد تا متن و اعدادی مانند برچسبها، دستهها یا شماره سریال را بخواند. هرچه متن پیچیدهتر شود، به احتمال زیاد نیاز خواهید داشت که قابلیتهای بینایی ماشین خود را از طریق آموزش سیستم با ماشین یا یادگیری عمیق ارتقا دهید.
- اندازهگیری یا سنجش: قابلیت اندازهگیری ابعاد اقلام یا اشیاء را در مرحله پردازش تصویربرداری فعال میکند. این ویژگی به سیستم بینایی اجازه میدهد تا ابعاد جسم را در واحدهای اندازهگیری مختلف مانند پیکسل، اینچ، میلیمتر، طول، زمان، وزن و غیره درک کند.
- نتیجه تصمیمگیری: این چیزی است که شی یا موردی که از سیستم عبور میکند با آن اندازهگیری میشود تا ببینیم در این فرآیند به کجا میرود. به عنوان مثال، اگر محصولی استانداردهای لازم را نداشته باشد، در مقایسه با زمانی که استانداردها را پاس کند، به بخش دیگری منتقل میشود. یا ممکن است اگر آیتم به مقصد خاصی میرود، سیستم بینایی ماشین آن را از طریق خواندن بارکد دریافت کرده و در مسیر درست برای آن آیتم ارسال میکند. همچنین میتوان از آن برای تشخیص عیوب در مواردی استفاده کرد تا مشخص شود که آیا الزامات مورد نیاز برای رفتن به بخش بعدی سیستم را برآورده میکند یا ناموفق است. هر چه عیوب پیچیدهتر باشد که سیستم بینایی ماشین باید تشخیص دهد، احتمال بیشتری وجود دارد که سیستم بینایی ماشین برای تشخیص عیوب به یادگیری ماشینی و/یا یادگیری عمیق شبیه به تشخیص الگو نیاز داشته باشد .
- خروجیها: در فرآیند بازرسی و مرتبسازی که میتوان با بینایی ماشین انجام داد، خروجی بخش پایانی است که تصمیم میگیرد با آیتم، شی یا محصول روی سیستم چه کاری انجام شود. این شبیه به نتیجه تصمیم است با این تفاوت که برای انتهای خط سیستم تعبیه شده است. معمولاً خروجیها مکانیسمهایی را فعال میکنند که موارد یا اشیاء ناموفق را رد میکنند، در حالی که دیگران ممکن است آلارمهایی را به صدا در آورند تا اپراتورها را به مشکلی در یک محصول خاص یا کل سیستم ارجاع دهند. به عنوان مثال ممکن است خط پردازش پر شود و باعث انسداد مسیر شود که جریان اقلام در بینایی ماشین را متوقف میکند که باعث تولید هشدار میشود زیرا دستگاه برای مدت زمان معینی یک مورد را بازرسی نکرده است. داده های یک خروجی را میتوان از طریق داشبورد بصری یا HMI برای شناسایی فرصتها و روشهای ممکن برای بهینهسازی هر یک از بخشهای سیستم یا کل سیستم، ضبط و برای اپراتورها تفسیر کرد. این البته خطر موقعیتهایی مانند مثال با انسداد دوباره روی خط را کاهش میدهد که به نوبه خود کارایی را افزایش میدهد.
راهنمای رباتیک با بینایی ماشین
امروزه رباتها به طور فزایندهای در صنایع و بخشهای مختلف مورد استفاده قرار میگیرند و در نتیجه بینایی ماشین به طور فزایندهای توسط روباتها استفاده میشود. وقتی روباتها به بینایی ماشین مجهز میشوند، این مکانیزم دقت، جهتگیری و درک بسیار بیشتری به آنها میدهد.
این موضع به آنها اجازه میدهد تا با دقت بیشتری اطراف خود را درک کنند و کارهای پیچیدهتری مانند بازرسی را در زمان سریعتری انجام دهند. این قابلیت به اپراتورها اجازه میدهد تا با استفاده از کنترل کننده حرکت 1 یا 2 محوره، رباتها را به روشی سادهتر جابجا کنند.