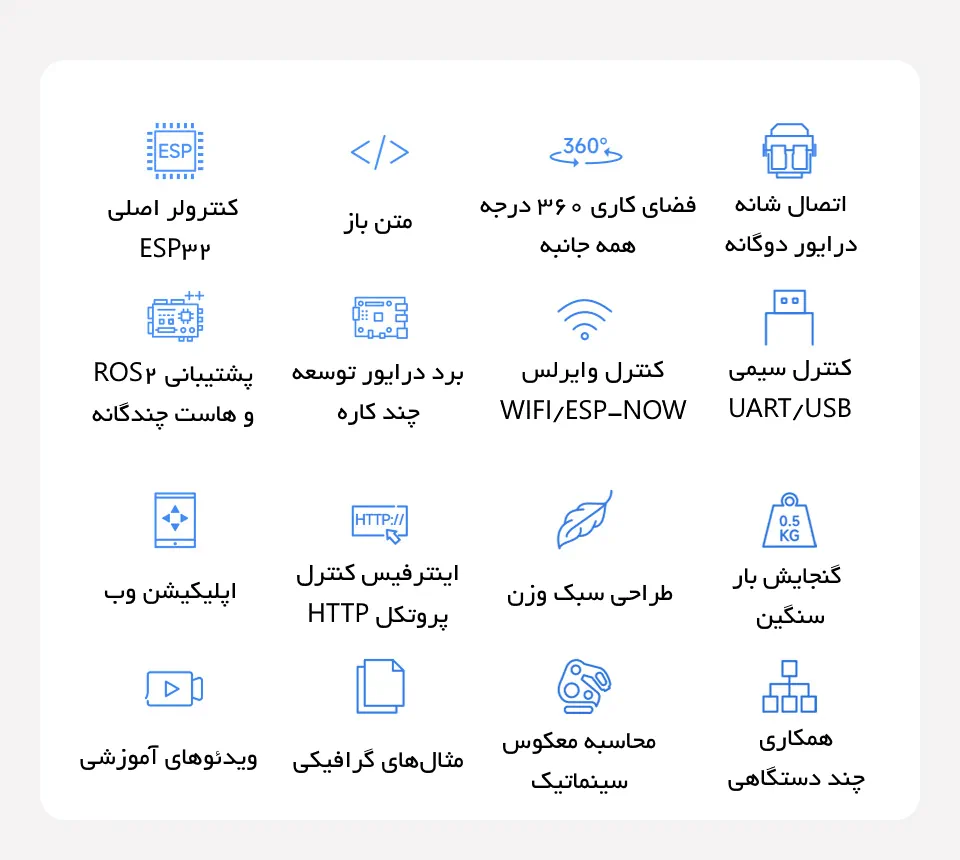
بازوی رباتیک RoArm-M2-S یک بازوی رباتیک هوشمند با چهار درجه آزادی است که برای کاربردهای متنوع و خلاقانه طراحی شده است. طراحی ساختار سبک وزن با وزن کلی کمتر از 850 گرم و بار موثر 0.5 کیلوگرم در 0.5 متر که این بازور را قادر میسازد تا به شکلی انعطافپذیر بر روی پلت فرمهای مختلف ثابت و متحرک قابل استفاده شود. در این بازوی رباتیک برای ایجاد فضای کاری با قطر 1 متر، از یک پایه با قابلیت استفاده به صورت 360 درجه همه جهته ترکیب شده با سه اتصال انعطاف پذیر بهره گرفته میشود. بازوی RoArm-M2-S دارای طراحی مستقیم درایو مشترک است که دقت تغییر موقعیت را افزایش میدهد و همچنین قابلیت اطمینان ساختاری را بهبود میبخشد، همچنین با فناوری نوآورانه درایو دوگانه، گشتاور مفصل شانه را دو برابر میکند.
ماژول کنترلی و پردازشی اصلی این بازو برد پردازشی ESP32 است که از حالتهای کنترل بی سیم متعدد پشتیبانی کرده و رابطهای کنترلی و پروتکلهای ارتباطی غنی را برای اتصال آسان به دستگاههای مختلف فراهم میکند. این بازو یک برنامه کاربردی وب کاربرپسند و چند پلتفرمی را ارائه میدهد که یک حالت کنترل مختصات ساده و بصری را ادغام میکند و شروع کار با آن را آسانتر میکند. بازوی رباتیک RoArm-M2-S همراه با آموزشهای گرافیکی و ویدیویی غنی برای کمک به یادگیری و استفاده سریع از آن است. همچنین سازگار با ROS2 و رایانههای میزبان مختلف بوده و از حالتهای مختلف ارتباط بی سیم و سیمی پشتیبانی میکند.
در نگاهی کلی، بازوی RoArm-M2-S به تعادل عالی بین سبکی وزن، کاربر پسند بودن، قابلیت توسعه، گسترش و نوآوری باز دست مییابد. در دیدی کلی میتوان گفت که این یک بازوی رباتیک چند منظوره است که کنترل هوشمند، تعامل انسان و ماشین و توسعه قابل تنظیم را به صورتی یکجا ادغام میکند. این بازوی رباتیک وسیلهای ایده آل برای برنامههایی است که نیاز به ترکیبی از انعطاف پذیری، قابلیت گسترش و کاربر پسند بودن را دارا هستند.
ویژگیهای بازوی رباتیک RoArm-M2-S
مدل: RoArm-M2-S
درجه آزادی: 4 درجه آزادی
فضای کاری:
قطر افقی: حداکثر 1090 میلی متر، 360 درجه چند جهته
قطر عمودی: حداکثر 798 میلی متر
ولتاژ کاری: 12 ولت 5 آمپر به همراه پشتیبانی از باتری لیتیومی 3 سل
گنجایش بار: 0.5 کیلوگرم در محدوده 0.5 متر
دقت جایجایی: در حدود ±4 میلی متر
سرعت چرخش سروو: 40 دور در دقیقه(بدون بار، بدون محدودیت گشتاور)
محدوده عملیاتی:
بخش مرکزی: 360 درجه
بخش شانه: 180 درجه
بخش آرنج: 180 درجه
دست: 135/270 درجه
نوع درایور: سروو سریال باش TTL و اتصال دایرکت درایو
تعداد سروو: 5 عدد
سنسور زاویه اتصال: 120 بیت 360 درجه کدگذاری مغناطیسی
گشتاور سروو: 30 کیلوگرم بر سانتی متر با ولتاژ 12 ولت
اطلاعات فیدبک مشترک:
وضعیت سروو
زاویه مفصل
سرعت چرخش
بار مفصل
ولتاژ، جریان، دما و حالت کاری سروو موتورها
کنترلر اصلی: ESP32-WROOM-32
ویژگیهای ماژول کنترولر اصلی:
دارای Wi-Fi
دارای بلوتوث
تعداد هسته: 2 عدد
فرکانس پردازنده: 240 مگاهرتز
حالت کنترول بی سیم:
Wi-Fi با فرکانس 2.4 گیگاهرتز
ESP-NOW
حالت کنترول سیمی: USB و UART
حالت عملیاتی دستی: اینترفیس کنترل مبتنی بر WEB
حالت عملیاتی میزبان: UART/USB/ESP-NOW/HTTP بوسیله دستورات فرمت داده JSON
پشتیبانی میزبان: اتصال دستگاهها توسط USB شامل رزبری پای، جتسون ORIN نانو و کامپیوتر
تابع EOAT: عملکرد گیره به صورت پیش فرض که میتواند به عنوان یک درجه آزادی بیشتر تغییر کند.
توان LED: کمتر مساوی 1.5 وات
ابعاد صفحه نمایش OLED: برابر با 0.91 اینچ
کارکردهای دیگر: سوئیچ منبع تغذیه 2 کانال 12 ولت و IMU با 9 درجه آزادی
وزن بازوی رباتیک: 826±15 گرم(بدون گیره تثبیت کننده کنار میز)
وزن گیره کنار میز: 286±10 گرم
گیرههای بازوی رباتیک و محدوده عملیاتی آن
گیرههای بازوی رباتیک و زاویه چرخش آن در تصاویر زیر نمایش داده شده است.
ویژگیهای بدنه بازوی رباتیک و روشهای اتصال بازو
ویژگیهای بدنه بازوی رباتیک و روشهای اتصال بازو در تصاویر زیر نمایش داده شده است.
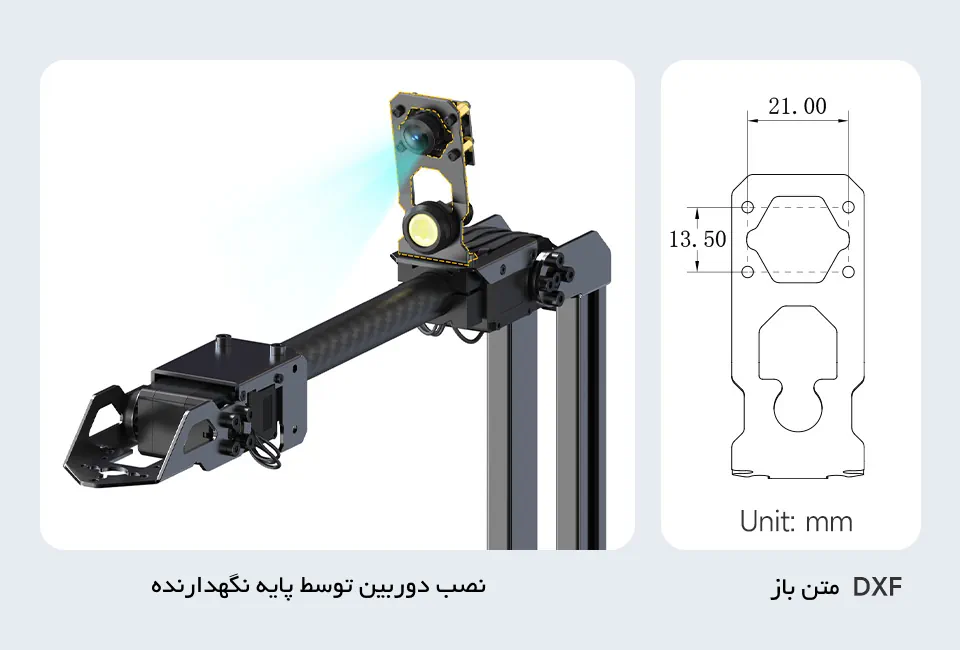
قابلیت نصب دوربین و ویژگیهای کنترولر
قابلیت نصب دوربین و ویژگیهای کنترولر بازوی RoArm-M2-S در تصاویر زیر نمایش داده شده است.
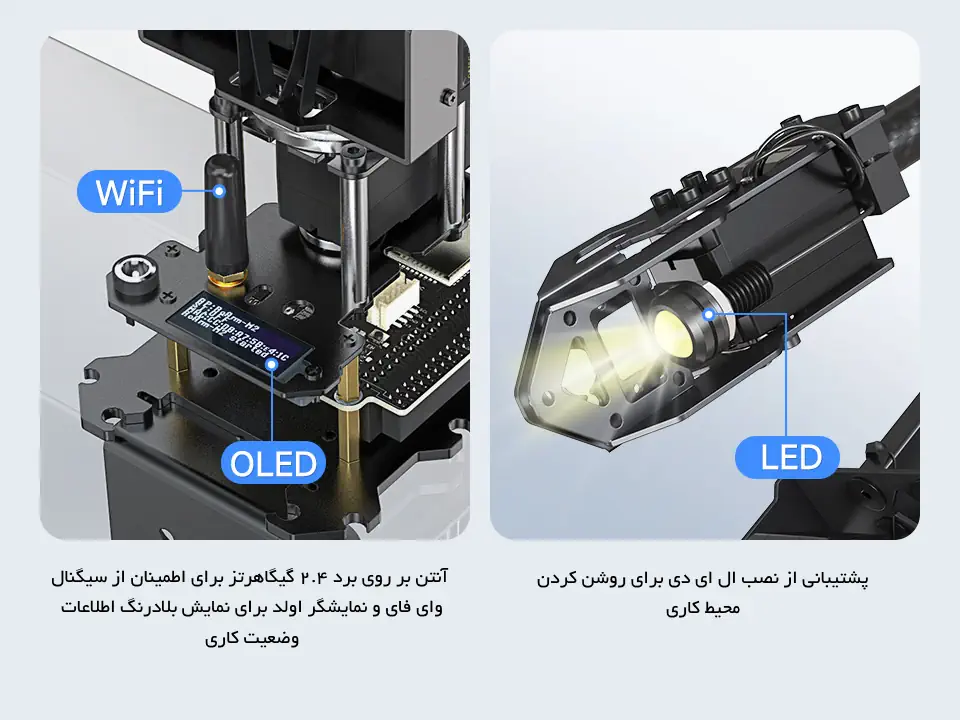
قابلیت نصب دوربین و ویژگیهای کنترولر
قابلیت نصب دوربین و ویژگیهای کنترولر بازوی RoArm-M2-S در تصاویر زیر نمایش داده شده است.
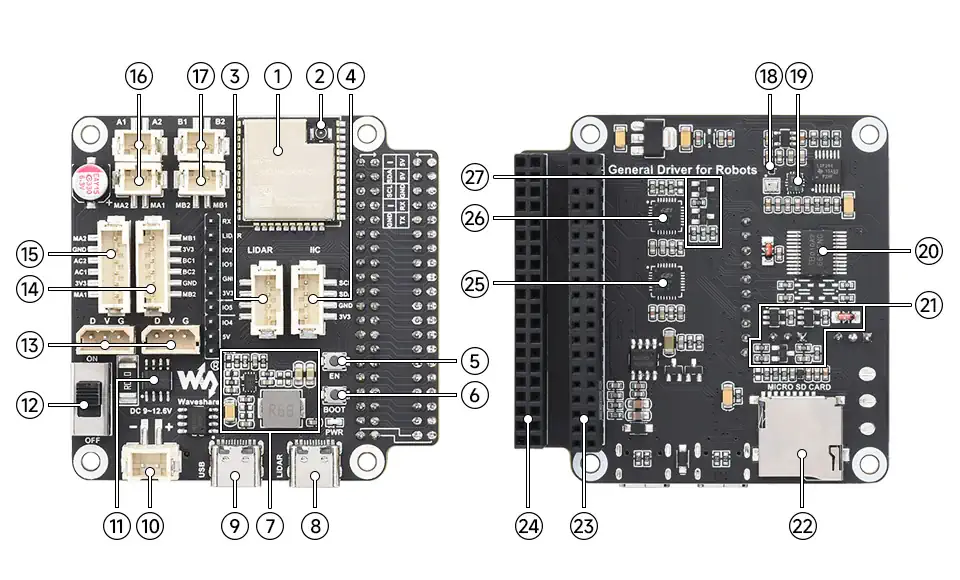
جزئیات برد بازوی رباتیک RoArm-M2-S
ماژول کنترلر ESP32-WROOM-32
کانکتور IPEX1 WIFI
رابط LIDAR
رابط توسعه محیطی I2C
دکمه شروع مجدد
دکمه دانلود
مدار تنظیم کننده ولتاژ DC-DC 5V
پورت تایپ سی (LADAR)
پورت تایپ سی (USB)
پورت برق XH2.54
چیپ نظارت ولتاژ و جریان INA219
دکمه روشن / خاموش
رابط سروو باس سریال ST3215
رابط موتور PH2.0 6P
15. رابط موتور PH2.0 6P
16. رابط موتور PH2.0 2P گروه A
17. رابط موتور PH2.0 2P گروه B
18. قطب نمای الکترونیکی 3 محوره AK09918C
19. سنسور حرکت 6 محوره QMI8658C
20. تراشه کنترل موتور TB6612FNG
21. مدار کنترل سروو باس سریال
22. اسلات کارت TF
23. هدر 40 پین GPIO
24. هدر توسعه یافته 40PIN
25. چیپ CP-2102 برای انتقال داده رادار UART به USB
26.چیپ CP-2102 برای ارتباط ESP32 در UART به USB
27. مدار دانلود خودکار
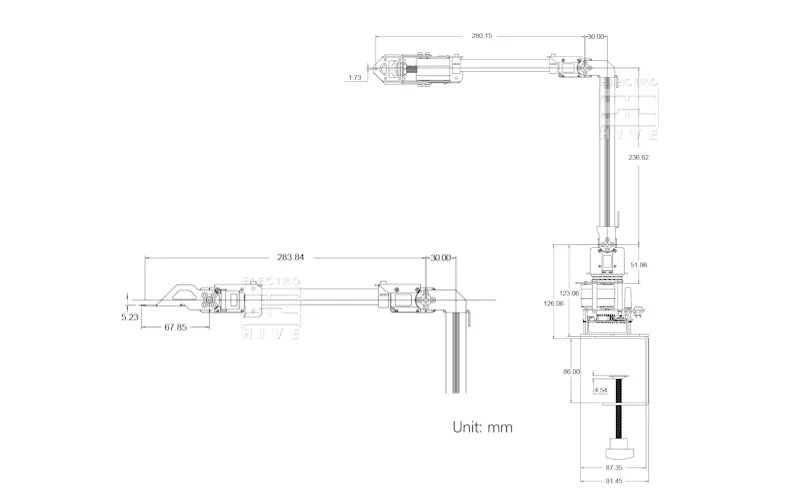
ابعاد بازوی رباتیک ESP32
تصویر زیر ابعاد بازوی رباتیک ESP32 را به میلیمتر نمایش میدهد: